Unser neustes Produkt im Sortiment ist der Paradisetronic.com Lauflichtbausatz V1.1 mit 12 LEDs, die durch einen programmierbaren ATtiny-Mikrocontroller angesteuert werden. Der Aufbau des Lauflichtbausatzes eignet sich hervorragend als Lötübung für Einsteiger.
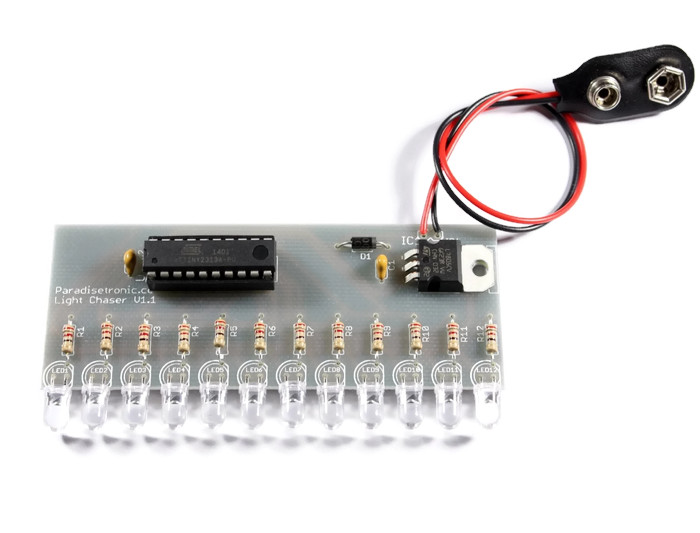
Der Bausatz besteht aus folgenden Komponenten:
- 1x Platine mit schwarzer Rückseite
- 1x Atmel Mikrocontroller
- 12x Widerstände
- 12x superhelle LEDs
- 2x 100nF Kondensatoren
- 1x 7805 Spannungsregler
- 1x 1N4001 Diode
- 1x 20-poligen IC-Sockel
- 1x 9V-Batterieclip
Hier geht es zur Aufbauanleitung: „Lauflichtbausatz V1.1 von Paradisetronic.com“ weiterlesen

![Genuino Starter Kit [Deutsch]](https://blog.paradisetronic.com/wp-content/uploads/2016/09/gkx05007_detail.jpg)